LiDARの原理と距離精度向上におけるカバーの役割
LiDARカバーに求められることとDNPの独自技術も紹介

|
|

LiDARとは
LiDAR(Light Detection and Ranging)はレーザーを使った高精度な距離センサーです。LiDARは地形や建物、歩行者といった周囲の物体までの距離を、リアルタイムで三次元的に検知することができます。LiDARは地図作成や移動ロボットなど幅広い分野に応用されていますが、なかでも自動運転への応用に注目されています。
日本で市販された最も高機能な自動運転車は、自動運転レベル3(条件付自動運転)を達成しており、5個のLiDARを搭載しています。また、自動運転レベル3相当を達成したとされる他のメーカー車も、前方に1個のLiDARを搭載しています。
このように、高度な自動運転機能の実現にLiDARは有用な技術と言えます。今後、より高度なレベル4(高度自動運転)やレベル5(完全自動運転)の実現に当たって、LiDARはますます重要となる技術でしょう。
※こちらのページに記載されている内容は、2023年12月時点の情報です。
LiDARにおける長距離検出のニーズと課題
|
|

長距離検出に必要なこと
自動運転に用いられるLiDARは、長距離検出が可能なものでなくてはなりません。一般的には、200 m以上が必要であるといわれています。そこで課題となるのが、跳ね返ってきたレーザー光をキャッチする能力です。LiDARから射出されたレーザー光は、物体の表面で散乱してしまうため、LiDARに返ってくる光はごくわずかになってしまいます。もし跳ね返ってきたレーザー光をキャッチできなければ、その物体はなかったものとして処理されてしまいます。従って、遠い地点で反射されて返ってきたレーザー光をいかにキャッチできるかが、LiDARを設計する上で非常に重要なポイントになります。
課題:アイセーフのためレーザー出力を上げられない
長距離検出を可能とするためには、射出するレーザー光の強度を上げることが有効です。LiDARでは、波長905nmの赤外レーザーを用いることが一般的で、この波長のレーザー光は人間の目に対する安全性が比較的高いのですが、無制限に出力を上げられるわけではありません。加えて、レーザー光強度を上げることは装置の大型化やコストアップ、消費電力の増加を招きます。
また、レーザー光の受光感度を上げることも長距離検出のために有効ですが、受光素子の高性能化が必要であるという点で、コストや技術的ハードルが高くなります。
従って、長距離測定のためにはLiDARに戻ってくる反射光が受光素子に至るまでの道のりの中で、カバーやレンズ、ミラー面などにより散乱し失われてしまう光をできる限り減らし、反射光を効率よく集光する性能が重要になるのです。
LiDARカバーに求められることとDNPの独自技術
LiDARカバーの課題
車載用LiDARの筐体は、飛び石や泥ハネからセンサーを守るためにカバーで覆われています。従来、長距離検出用のLiDARが光を射出し集光する部分は、レーザー光が透過しやすいガラス素材で作られる設計が一般的でした。しかし、ガラスは樹脂よりも高価であることや、組み立てる上で樹脂とガラスをつなぐ必要があることから、生産性やデザインの自由度に制限が生じてしまいます。
DNPでは、これらの課題を解決するために、以下のような製品の開発に取り組んでいます。
赤外低反射フィルム(NIR-ARフィルム) ※開発中
DNPが開発したNIR-AR(NIR:Near Infrared Rays=近赤外線、AR:Anti-Reflection=低反射)フィルムは、LiDARカバーでのレーザー光の反射を抑えることで、レーザー光の透過率を向上させます。ガラスの代わりにポリカーボネート樹脂を用いると、カバーの一体成型が可能となり、生産性の向上につながるとともにデザインの自由度も高まります。加えて、ポリカーボネートはガラスと比較して割れにくく、安価で耐候性に優れる素材です。また、形状の加工も比較的容易なため、レーザーの入射角度を最適化して屈折によるひずみを低減できることや、車種に応じた意匠変更がしやすいことも利点です。
|
|

内側に低反射フィルムを形成したLiDARカバー(下)では、形成していないもの(上)に比べて、LiDARカバーの表面で反射されるLaser光を抑えるため、透過率が向上する。
DNPの光学フィルム
DNPでは、赤外低反射フィルム(NIR-ARフィルム)以外にも、ARフィルムやAGフィルムなど光学フィルムの設計・製造に関するノウハウを多数保有しています。
ARフィルム

|
|---|
ARフィルムまたはLRフィルム(AR:Anti-Reflection、LR:Low-Reflection)とは、反射防止層の付いた光学積層体です。AR 層による光干渉を利用することで反射光を低減させ、画面への映り込みを抑えることができ、透過率も向上します。
AGフィルム

|
|---|
AGフィルム(AG:Anti-Glare)とは、ベースとなるフィルム基材の表面に粒子を配置して凹凸を形成した光学積層体です。AGフィルムをディスプレイの表面に用いることで、入射光を乱反射させて外光の映り込みを軽減させ、ディスプレイ画面の視認性を向上させることができます。
LiDARカバー用光学フィルムの開発・製造ならDNPへ
DNPではLiDARカバー用光学フィルムの設計・製造に関するノウハウを多数保有しています。LiDARカバー用光学フィルムの開発・製造はDNPにお任せください。
個人の方のお問合わせは、お断りしておりますので、あらかじめご了承ください。
参考 : LiDARの原理と走査方法
LiDARの原理
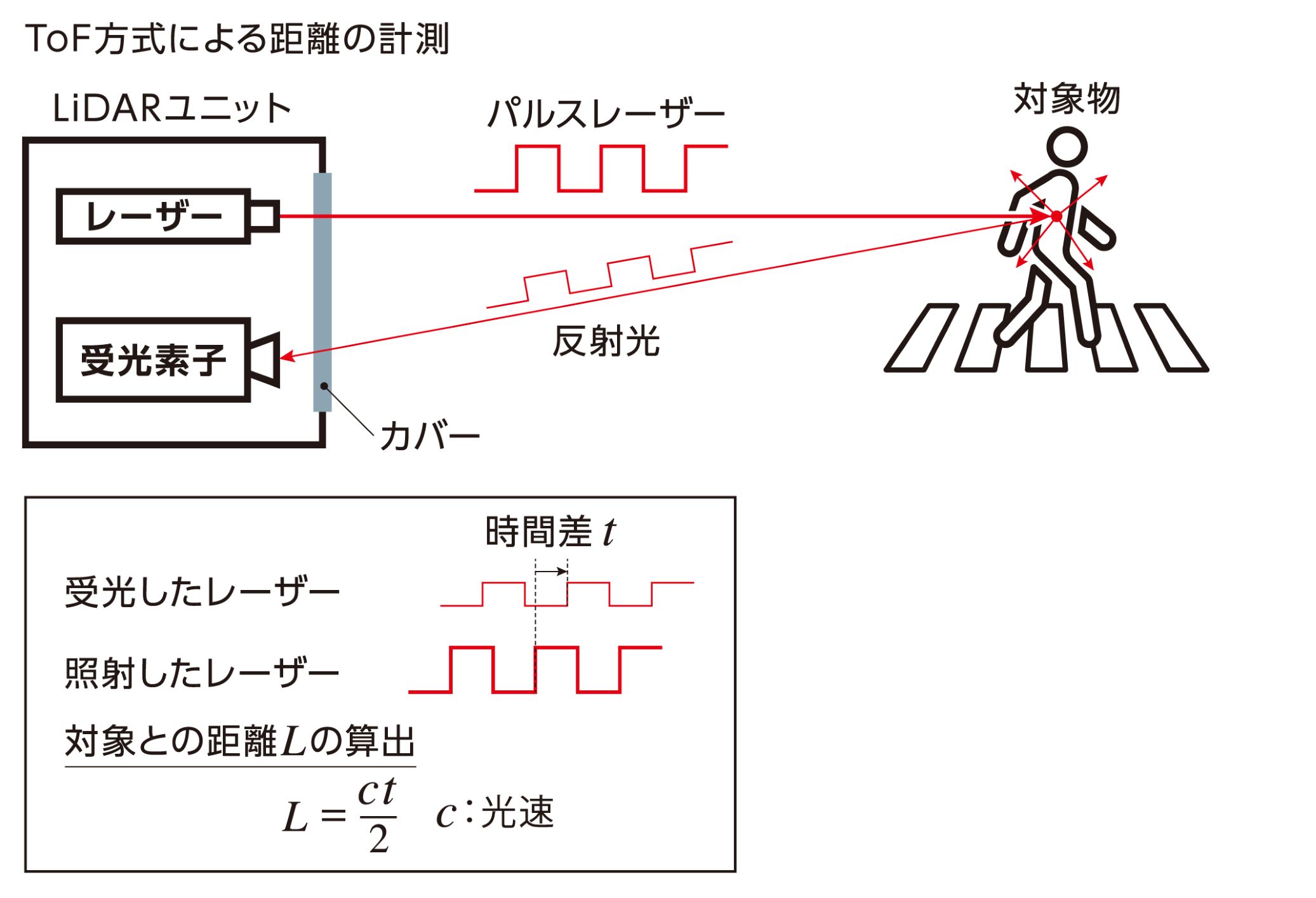
現在実用化されているLiDARでは、測距方法の違いによってToF(Time of Flight)方式とFMCW(Frequency Modulated Continuous Wave)方式の2つの方式があります。
ToF方式の原理はとてもシンプルです。まず、LiDARは測定したいポイントに向かってレーザー光を照射します。その先に物体があれば、レーザー光の一部が物体の表面で反射し、再びLiDARのもとへ跳ね返ってきます。LiDARはレーザー光を照射してから、跳ね返ってきた光を受光するまでの時間を精密に計測します。そして、レーザー光が物体との間を往復するのにかかった時間から、物体との距離を正確に算出します。現在市販されているLiDARの主流はToF方式です。
|
|
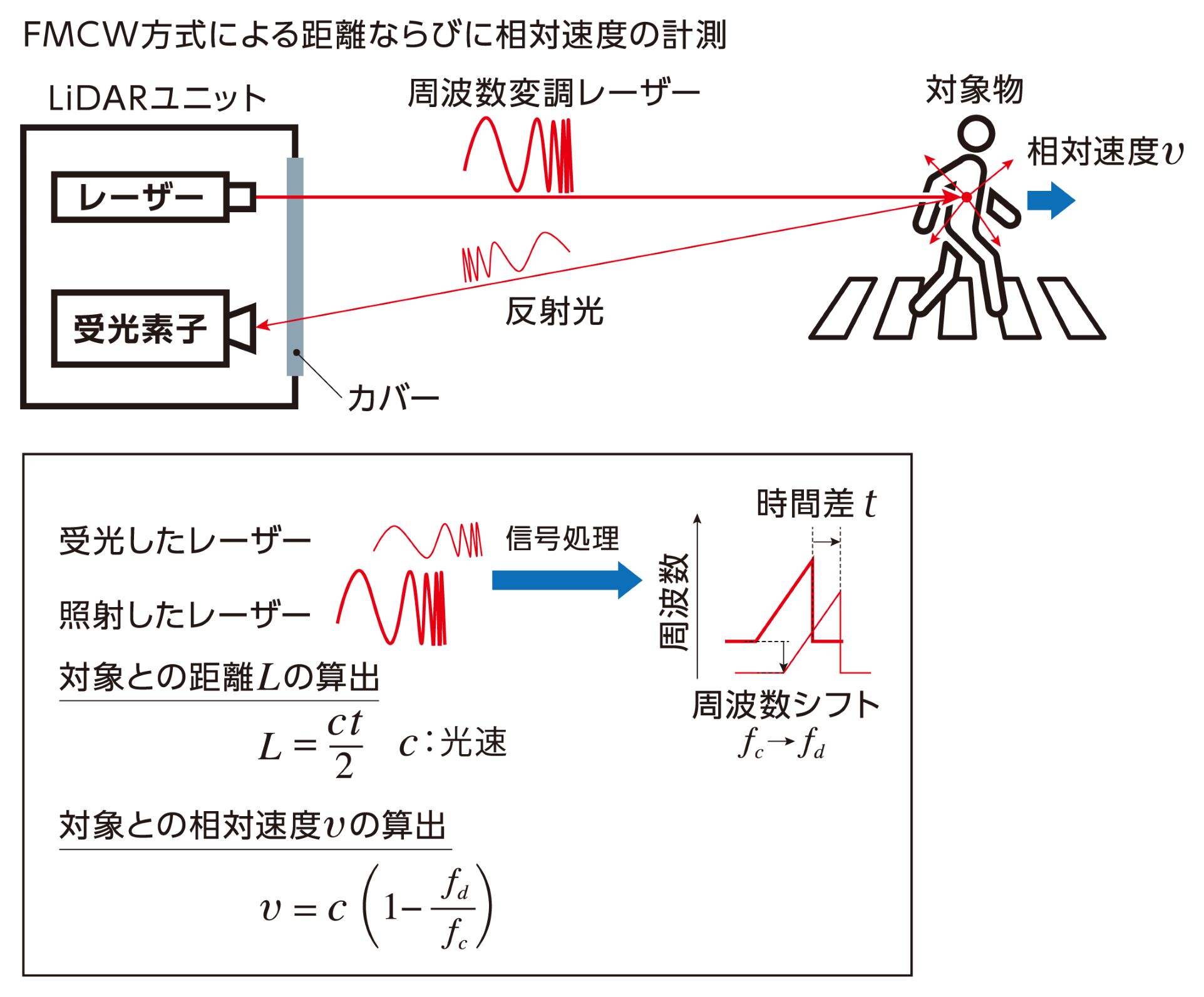
一方、FMCW方式は、測定したいポイントに向かってレーザー光を射出し、跳ね返ってきた光をキャッチするという点はToF方式と同様ですが、照射するレーザー光の周波数を連続的に変化させています。すると、跳ね返ってきたレーザー光の位相は、ぶつかった物体との間の距離や物体が持つ速度に応じて変化するため、物体との距離情報を、物体の速度情報と併せて取得することができます。
|
|
LiDARの走査方法
このような原理で機能するLiDARは、さまざまなレンズや光学素子を利用し、広い範囲の測定ができるように工夫されていますが、車載用としては、機械回転式とソリッドステート式が使われています。
機械回転式は、いち早く実用化された方式であり、自動運転の研究用車両等で広く用いられており、レーザー光源やレーザー光を反射する鏡をモーターで回転させます。モーターを使うため、消費電力やコストを抑えにくかったり、小型化が難しいという問題があります。
ソリッドステート式は、モーターを使用せず、多種多様な方式が提案されている最中にありますが、大きくはフラッシュ式と走査式の2つに分類できます。フラッシュ式は、集積させたセンサーが一面に照射したレーザー光を一度にキャッチし、測定することができます。信頼性や量産性に優れた方式であるものの、測定可能な距離が比較的短いため、高強度のレーザー光源が必要です。走査式はMEMS(Micro Electro Mechanical Systems)走査式とOPA(Optical Phased Array)走査式があります。MEMS走査式は、MEMSマイクロミラーと呼ばれる、電気駆動式の微細な鏡でレーザー光の射出方向を変えて、広い範囲をスキャンしていく方式です。OPA走査式は光の回折や干渉といった性質を利用して、光の射出方向を制御し、周囲をスキャンしていく方式です。いずれも測定精度、消費電力、量産性に優れますが、測定可能な距離とセンシングデータの更新頻度がトレードオフの関係になるという課題があります。
